Österreich: Roboter lernen mit Stoffen und Folien umzugehen

Foto: Stefan Flixeder
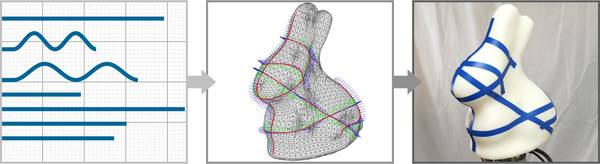
Foto: Christian Hartl-Nesic
Wien (OTS) - Gerade in der Textilindustrie ist nach wie vor sehr viel Handarbeit notwendig. An der TU Wien werden in Kooperation mit dem AIT Austrian Institute of Technology Methoden und Technologien entwickelt, die Robotern den Umgang mit weichen, verformbaren Materialien ermöglichen.
Wie klebt man ein weiches Stück Kunststoff auf einen Schuh, so dass dieses keine Falten wirft und sich der Schuhform anpasst und mit dem Schuh verbindet? Wie kann man Textilien straff und faltenfrei auf Oberflächen drapieren und dann beispielsweise vernähen oder verkleben? Jeder weiß, dass dies mit viel Übung und Fingerspitzengefühl für uns Menschen machbar ist. Für Roboter sind diese Aufgabe nach wie vor schwierig zu lösen. Daher ist überall dort, wo in der Industrie weiche, verformbare Materialien (z.B. Leder, Stoffe, Folien, technische Textilien) verwendet werden, immer noch viel Handarbeit notwendig.
An diesen Fragestellungen arbeiten die TU Wien und das AIT Austrian Institute of Technology gemeinsam. Erste Erfolge konnten die Partner anhand von ausgewählten Demonstratoren verzeichnen.
Faltenfreies Drapieren oder Kleben
„Das Problem kennt man aus unterschiedlichen Bereichen der Industrie“, sagt Prof. Andreas Kugi, Vorstand des Instituts für Automatisierungs- und Regelungstechnik an der TU Wien und Leiter des Centers for Vision, Automation and Control am AIT. „In der Schuh- und in der Textilindustrie hat man mit Werkstoffen zu tun, die sich allein aufgrund der Schwerkraft verformen. Das macht die Verarbeitung äußerst schwierig. Auch in der Automobilindustrie spielt das eine wichtige Rolle, etwa bei der Herstellung des Interieurs aus Leder oder Textilien, z.B. eines Armaturenbretts.“
Die Herausforderung aus Sicht der Automatisierung besteht darin, die Vielzahl an unterschiedlichen Aufgaben zu beherrschen: Je nach Größe und Form der Objekte bzw. Komponenten müssen die Roboterbewegungen ständig angepasst werden. Die Kräfte, die zu jedem bestimmten Zeitpunkt ausgeübt werden müssen, hängen von kleinen, geometrischen Details der Aufgabenstellung ab. Es gibt kein einfaches Grundprinzip, mit dem ein Roboter viele unterschiedliche Situationen auf zufriedenstellende Weise meistern kann.
„Wir Menschen sind ungeheuer flexibel – wir koordinieren mühelos unser Sehvermögen mit unserer Fingerfertigkeit, wir können uns an unterschiedliche Materialien, Formen und Strukturen anpassen. Etwas Ähnliches einer Maschine beizubringen, ist eine große Herausforderung“, sagt Andreas Kugi.
Möglich wird es mit ausgefeilten Algorithmen, die in den Teams an der TU Wien und am AIT Austrian Institute of Technology entwickelt wurden: Die Arbeitsschritte werden präzise vorausgeplant – man berechnet nicht nur, an welchen Punkten ein Kontakt zwischen Roboter und Werkstück stattfinden soll, sondern auch in welcher Richtung und mit welchem Kraftaufwand. Gleichzeitig wird vorherberechnet, wie sich die Form des verwendeten Materials dabei ändern wird.
„Unsere Methode ist extrem flexibel“, sagt Dr. Christian Hartl-Nesic vom Institut für Automatisierungs- und Regelungstechnik. „Wir haben die entwickelte Methode demonstriert, indem wir ein komplexes 3D-Objekt mit unterschiedlichen Krümmungen – einen Hasen – an exakt vorgegebenen Stellen mit langen (gekrümmten) Streifen automatisiert faltenfrei bekleben. Aber man könnte dieselben Algorithmen und Methoden auch für ganz andere Anwendungen nutzen, etwa um den Roboter auf dreidimensionalen Oberflächen genau vorgegebene Schnitte setzen zu lassen, oder ein gekrümmtes 3D-Objekt mit einer aufgesprühten Materialschicht zu versehen, die an jedem Ort genau die richtige Dicke hat.“
Nicht alle Aufgaben können Maschinen ganz allein übernehmen: Die Gruppen an der TU Wien und am AIT Austrian Institute of Technology entwickelten auch Methoden, mit denen Mensch und Maschine besser zusammenarbeiten können. Der Mensch kann die Maschine gezielt führen und diese lernt dabei das richtige Verhalten. „So kann Automatisierung auch für Kleinserien sinnvoll werden, wo es sich bisher aufgrund des großen Programmieraufwandes nicht gelohnt hätte, die Maschinen eigens anzupassen.“ sagt Dr. Tobias Glück, Leiter der Forschungsgruppe Complex Dynamical Systems am AIT. Dazu ist es notwendig, fortgeschrittene Methoden der Umgebungserkennung, der automatisierten Planung sowie Greiftechnologien zu entwickeln und diese synergetisch für die spezifischen Anforderungen zu kombinieren.
Die Arbeiten finden auch im internationalen Wissenschaftsbetrieb großen Anklang wie dies durch den Mechatronics Paper Prize Award 2020 für einen Beitrag im Journal Mechatronics aus dem Jahr 2018 und der jüngsten Veröffentlichung in der IEEE Transactions on Robotics bestätigt wird. „Durch die enge Zusammenarbeit zwischen der TU Wien und dem AIT versuchen wir die Ergebnisse der Grundlagenforschung sehr schnell in den Markt zu bringen und für die industrielle Praxis effektive Lösungen zu erarbeiten. Die Arbeiten an der TU Wien fokussieren sich dabei sehr stark auf den Bereich der grundlagenorientierten Methodenentwicklung und am AIT versuchen wir systematisch den Reifegrad der entwickelten Technologien zu erhöhen.“ erklärt Andreas Kugi. „Die Produktionstechnik und der Einsatz flexibler, lernfähiger und adaptiver robotischer Systeme wird sich in den nächsten Jahren kontinuierlich weiterentwickeln und zum Teil massiv verändern“, ist er weiters überzeugt. „Darin sollten wir eine Chance sehen und die Entwicklung aktiv mitgestalten.“
Weitere Informationen und Links
Videos:
- Zusammenarbeit von Mensch und Maschine beim Aufkleben eines Klebestreifens: https://www.acin.tuwien.ac.at/8a25/
- Der beklebte Hase: https://www.acin.tuwien.ac.at/52f5/
Journalbeiträge:
Mechatronics Paper Prize Award 2020:
* https://www.ifac-control.org/awards/journal-awards
Forschungseinrichtungen:
* AIT Center for Vision, Automation & Control * Automation and Control Institute (ACIN) / TU Wien
Quelle: OTS